¿Qué principios de funcionamiento existen para los sensores de ultrasonidos?

Modo barrera con dos barreras ultrasónicas
Mediante dos sensores de ultrasonidos
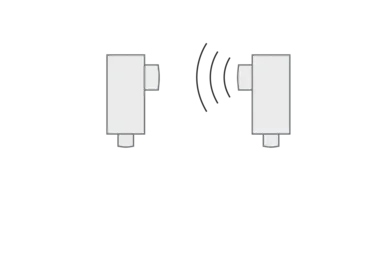
En el modo barrera, hay dispuestos dos sensores de ultrasonidos uno mirando al otro. De este modo, el emisor y receptor están uno frente al otro y se verifica si el receptor detecta la señal enviada por el emisor. En los sensores de ultrasonidos de wenglor, la parametrización permite determinar si funcionan como emisor o receptor. En principio, no es posible medir las distancias, sino únicamente detectar o diferenciar objetos.Sensores en horquilla para el reconocimiento de etiquetas
Los sensores en horquilla por ultrasonido son sensores especiales que funcionan según el modo barrera. Detectan etiquetas de cualquier material portante independientemente del color, la transparencia y las características de la superficie. En este caso, el emisor y el receptor se colocan en posiciones opuestas, pero dentro de la misma carcasa.¿Cómo funciona un sensor de ultrasonido?
Funcionamiento y estructura de un sensor de distancia por ultrasonido

Detección y medición con un sensor
Un sensor de distancia por ultrasonido detecta objetos sin contacto y mide la distancia entre el sensor y el objeto de medición. Para ello, emite cíclicamente en el cabezal del sensor una onda sonora corta y de alta frecuencia. Esta se propaga en el aire con la velocidad del sonido. Cuando el pulso sónico incide en un objeto, es reflejado por este y regresa de nuevo al sensor de ultrasonido. La sonda ultrasónica calcula de manera interna la distancia hasta el objetivo, mientras que mide el tiempo entre el envío y la recepción del pulso sónico.
Diferentes salidas de conmutación
A través de dos salidas de conmutación digitales independientes se pueden detectar dos posiciones (sensor de posición) o niveles de llenado (sensor de nivel de llenado). A través de una salida analógica se puede indicar la distancia/valor de medición real, ya sea como corriente (4…20 mA) o como tensión (0…10 V). Este valor también se puede indicar a través de IO-Link. Las salidas de conmutación se pueden configurar como NPN (Low Side), PNP (High Side) o push-pull.¿Cómo mide el sensor de ultrasonidos la distancia hasta el objeto?


Para ello, se tiene en cuenta la distancia L, el tiempo entre las ondas de ultrasonido T enviadas y recibidas y la velocidad del sonido C.Distancia L = ½ × T × C
¿Qué modos de funcionamiento tiene un sensor de ultrasonidos?

¿Qué es el modo barrera?
Ejemplo práctico: Detección de una lámina


¿Qué es el modo de sincronismo?
Ejemplo práctico: Registro de una tabla de madera larga sin desfase (sincronismo)


¿Qué es el modo multiplexor?
Ejemplo práctico: se monitoriza el nivel de llenado de una amplia superficie de un líquido en un recipiente
¿Cuál es la diferencia entre los sensores de ultrasonidos, los sensores de distancia, los sensores réflex y los sensores de horquilla?


El experto en ultrasonidos de wenglor, Dominik Jeßberger, conoce la diferencia:
“A los sensores de distancia réflex también se les denomina sensores réflex de ultrasonidos, sensores de proximidad o sensores de distancia ultrasónicos. En función del sector, se utilizan distintos términos. En última instancia, estos productos sirven para medir o controlar la distancia, verificar los niveles de llenado o contabilizar o detectar objetos.
Solo los sensores en horquilla por ultrasonido sirven para detectar etiquetas debido a su estructura: disponen de un ancho de horquilla extraordinariamente pequeño, un emisor y un receptor, así como una frecuencia sonora mejorada.”
¿Qué es un cono sónico?


¿Qué es el ángulo de abertura?
La estructura de la superficie del objeto que se va a medir no influye en el resultado de medición. De ahí que puedan detectarse mercancías a granel sin forma definida, láminas punzonadas con orificios u objetos pese a sus saltos y movimientos. Por ello, en las superficies sin forma definida, el ángulo de abertura es especialmente amplio, mientras que en las superficies más pequeñas, el ángulo de abertura se ajusta para que sea más estrecho.


¿Qué ocurre cuando el cono sónico supera en tamaño al objeto?
Para que el sensor de ultrasonidos pueda medir el tiempo entre la señal de emisión y la señal de recepción, el objeto que hay que detectar debe reflejar suficiente sonido. Cuanto menor sea la superficie del objeto de medición, menor será el sonido que se refleje. Si el objeto es demasiado pequeño, no se reflejará suficiente sonido, y el sensor ya no podrá detectar el objeto de medición. Para los objetos de medición pequeños, hay que utilizar sensores con un cono sónico estrecho. Con un haz de sonido enfocado, una gran parte de la energía sónica incide directamente en el objeto. De este modo, el objeto de medición devuelve prácticamente toda la energía sónica y así es percibida por el sensor. En general, no supone ningún problema que el objeto de medición sea más pequeño que el cono sónico. Para el punto de conmutación, el sensor se orienta primero hacia el objeto que hay que detectar.Para la detección de objetos muy pequeños, son más indicados los sensores optoelectrónicos con luz láser.


¿Cómo se ve afectado el cono sónico por los accesorios?
El cono sónico de un sensor de ultrasonidos puede verse afectado por la colocación de los accesorios delante de la zona de detección del sensor. Un tubo de sonido (o accesorio de transmisión sonora) sirve para transmitir el sonido y reducir el cono sónico, de manera que sea posible realizar una medición precisa a través de pequeños orificios. Especialmente durante el proceso de llenado en la industria alimentaria y farmacéutica, es necesario realizar mediciones del nivel de llenado en recipientes con orificios estrechos como botellas, cánulas o viales. El accesorio de transmisión sonora permite una ampliación sencilla del sensor de ultrasonidos en el tamaño miniatura 1K, sin modificar el tamaño de montaje (32 × 16 × 12 mm).¿Qué es el ultrasonido?
¿Es posible desviar el cono ultrasónico?



¿Qué es un oscilador en un sensor ultrasónico?
En un sensor de ultrasonidos, se denomina oscilador, zona de detección, convertidor de cerámica o transductor al área del sensor en la que se genera la señal. Puesto que esta superficie vibra, el sensor es resistente a cierto grado de contaminación: la suciedad no se adhiere al oscilador, sino que se despega con ligeros movimientos.Ventajas de los sensores de ultrasonidos


Supresión de fondo excepcional


Se detectan prácticamente todos los materiales


Gran amplitud de distancias


Resistentes a la influencia de perturbaciones
¿Qué objetos detectan los sensores de ultrasonidos?
Los sensores de distancia de ultrasonido miden las distancias con exactitud, independientemente del material, la superficie, el color o la transparencia.
Se detectan prácticamente todos los objetos

Resistentes al polvo, la niebla y la suciedad

Detección de formas complejas

Detección de objetos en medios agresivos y espuma

¿Qué objetos no pueden detectar de forma óptima los sensores de ultrasonidos?
- Los materiales blandos como la lana, la tela, la gomaespuma o el fieltro absorben el sonido o lo reflejan de forma difusa. De modo que un sensor de ultrasonidos mide a través del material blando y detecta la base dura (p. ej., la mesa situada detrás).
- Los objetos con una temperatura extremadamente elevada hacen que el eco no alcance el cabezal del sensor o lo haga solo de forma difusa.
- Los factores ambientales como las turbulencias del aire pueden afectar a la calidad del eco y, por lo tanto, a las mediciones. La influencia de la temperatura ambiente queda anulada mediante la compensación de temperatura.
Sectores e industrias donde se utilizan los sensores de ultrasonidos
Por un lado, existe la posibilidad de realizar una consulta de barreras mediante salidas de conmutación, como los controles de presencia de la madera en el proceso de avance completo de una línea de aserrado. Por el otro, es posible determinar las distancias mediante una salida analógica o evaluarlas mediante IO-Link.












Cuando se utilizan para detectar y controlar el nivel de llenado en las plantas embotelladoras, los sensores de ultrasonidos también funcionan de forma segura para el proceso.












Posibilidades de uso de los sensores de ultrasonidos
Control de presencia

Control de desgarro de láminas

Control del nivel de llenado

Control de holgura

Posicionamiento de robots

Control de la altura de apilamiento

Reconocimiento de etiquetas

Control de posición final

Barreras unidireccionales

Posicionamiento

¿Qué hay que tener en cuenta en el montaje de los sensores de ultrasonidos?

Uso general
- En el montaje de los sensores réflex de ultrasonidos, hay que evitar los depósitos de suciedad en la zona de detección (transductor).
- La zona de detección (oscilador) del sensor debe quedar libre.
- Es necesario proteger el producto frente a las influencias mecánicas.
- Asegurarse de que el sensor esté montado mecánicamente fijo.
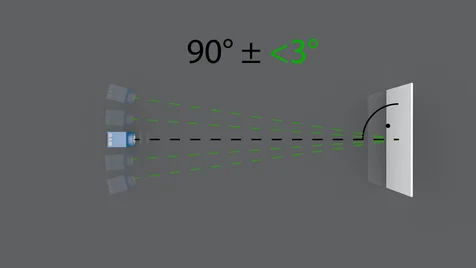
La imagen muestra el montaje óptimo de un sensor de ultrasonidos. Con objetos muy duros y lisos, el ángulo entre el eje del sonido y la superficie del objeto debe situarse a 90° ± 3°. En la mayoría de superficies del objeto, el ángulo puede ser mayor.
Influencia de agentes externos
Las corrientes de aire como el viento, corrientes de aire o el aire comprimido pueden afectar a la medición de los sensores de ultrasonidos en determinadas circunstancias. Con los sensores de ultrasonidos modernos, ya no es necesario considerar estos efectos perjudiciales específicos en los entornos industriales convencionales. ¿Es posible escuchar los sensores de ultrasonidos?
Los ultrasonidos en sí no son audibles para el oído humano; sin embargo, los sensores de ultrasonidos generan sonidos de baja frecuencia durante el funcionamiento a través de la emisión de paquetes de sonidos. En los sensores de ultrasonidos modernos, la vibración del oscilador es prácticamente inaudible.¿Qué diferencias existen entre los sensores de ultrasonidos y los sensores ópticos?


Detección de objetos
Los sensores de ultrasonidos se utilizan para registrar ondas de sonido, mientras que los sensores ópticos normalmente funcionan con luz infrarroja, luz roja, luz azul o luz láser. Existe una diferencia decisiva en el tamaño del área de consulta. Para elegir el sensor más adecuado, hay que tener el cuenta el caso de aplicación específico.Velocidad de registro
Puesto que la velocidad de la luz es superior a la velocidad del sonido, un sensor óptico realiza mediciones con más rapidez que un sensor de ultrasonidos.